Ascend 学习笔记 02 - API
参考教程视频:Ascend C算子开发中级教程——API通用解读
1 计算API
- 整个Tensor参与计算。有运算符重载了。
- Tensor 前 n 个数据计算。
Add(dst, src1, src2, n) - Tensor 高维切分计算。(不是前n个数,是任意哪些位置需要进行计算)
1.1 高维切分计算
- Repeat times (迭代次数)
- Repeat stride (相邻迭代间相同block的地址步长)
- Block stride (单词迭代内不同block间的地址步长)
- Mask (用于控制参与运算的计算单元)
1.1.1 Repeat times
下面的block不是之前算子调用的block,一个block特指32B数据
重点:矢量计算单元的一个指令周期可以算256B数据,即每次计算8个block
AIcore内部是SIMD。单指令多数据流。调用一次指令,可以重复进行多次计算。每次算 8 个 block 。
总共算几次呢?repeat times。
repeat times 存在一个 8 位的寄存器里,所以不能超过 255。
例如要计算 512B 的数据,512B = 256B * 2, 所以 repeat times = 2. 表示总共要计算 16个 block,共计256B。

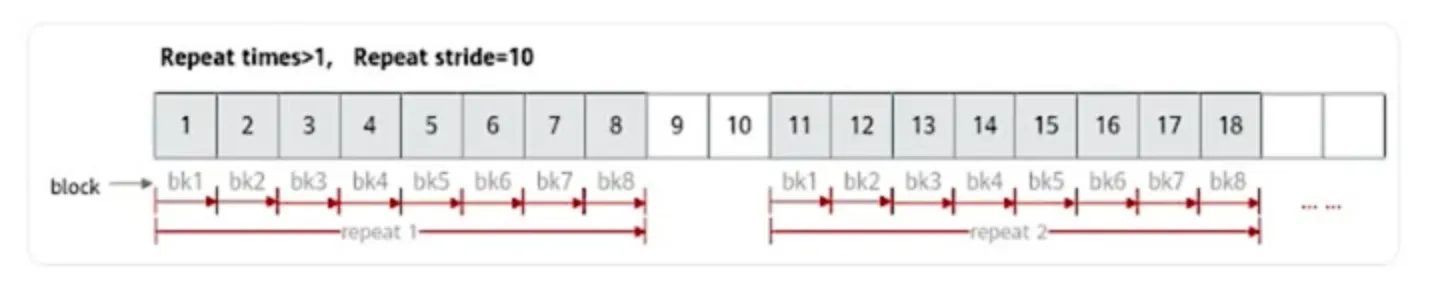
1.1.2 Repeat Stride
这就好理解了。每次 repeat 是一次迭代,两次迭代之间要间隔多少就是步长。
-
连续计算:stride = 8,因为每次算 8 block,间隔 8 个 block重复一次就是连续计算。

-
非连续计算:例如 stride = 10,每次中间会空两个 block 不计算。
-
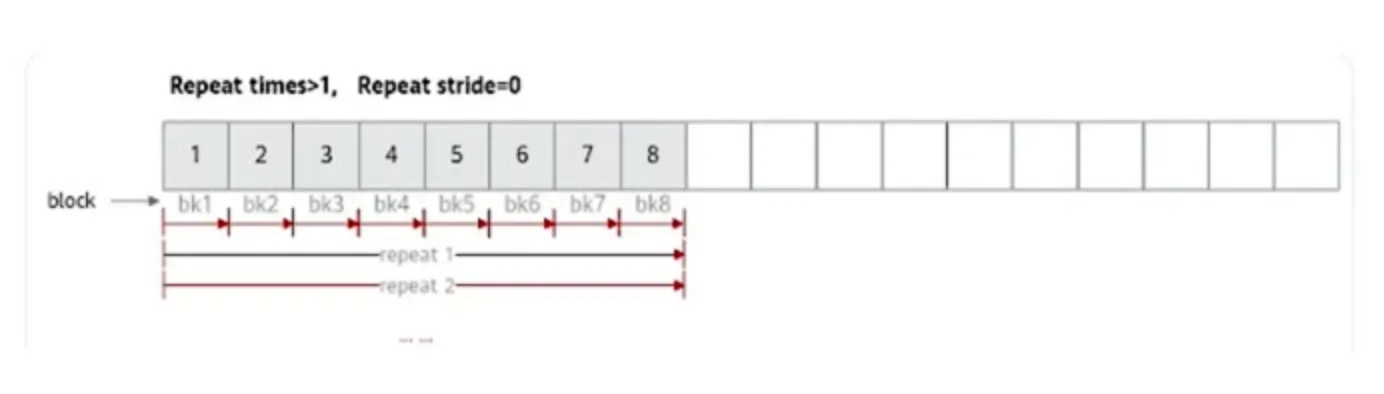
反复计算:stride < 8,例如 stride = 0,就是反复重新计算前8block的数据
1.1.3 Block stride
repeat stride 是迭代之间相隔多少,Block stride 是一个迭代之内相距多少。
直接上图:
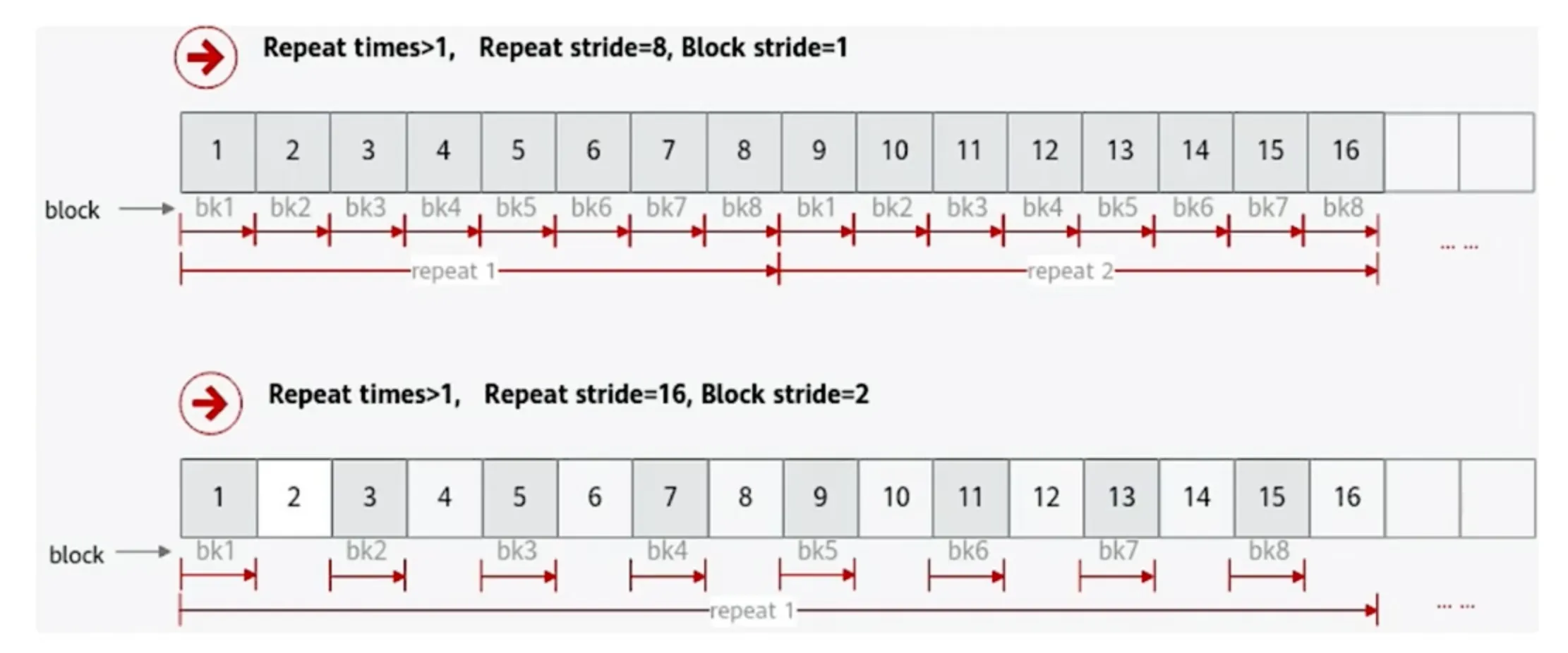
对于上图中 block stride = 2 的情况,跳过的block(2、4、6…)不会在第二次迭代里计算,第二次迭代直接从 17 开始。
block stride 也可以取 0,每次迭代重复计算一个元素8次。
1.1.4 mask
上面三个参数最小的控制单位只到 block,32B。32B还能存好几个数据(例如16个half,8个f32……)
这些数据还能更精细的进行计算,用到 mask 参数,每次计算的 256B 的数据,表示前多少个单位的数据可以参与计算。
直接看例子:
- 连续计算:
// 以int16_t类型为例,每个数字 16b=2B, 每次计算可以算 256B/2B = 128个数字。
// 设置 repeatTimes=1,只迭代一次,即计算8个block,即计算256B的数据,即128个int16_t的数字。
src0Local = [1,2,3,4,...,64,...,128] // 共计128个数
src1Local = [1,2,3,4,...,64,...,128] // 共计128个数
// mask的取值范围在 [1, 每次最多可以计算的数字个数] , 在这个例子中为 [1, 128]
// 我们取mask=64
uint64_t mask = 64; // 在范围内,合法输入。表示计算前64个数字
Add(dstLocal, src0Local, src1Local,
mask,
1, // repeaat times, 只迭代1次
{1,1,1,8,8,8} // {dst,src0,src1的blockstride, dst,src0,src1的repeatstride}
);
输出结果: dstLocal = [2,4,6,8,...,128,undefined,undefined,...,undefined]- 逐bit模式:
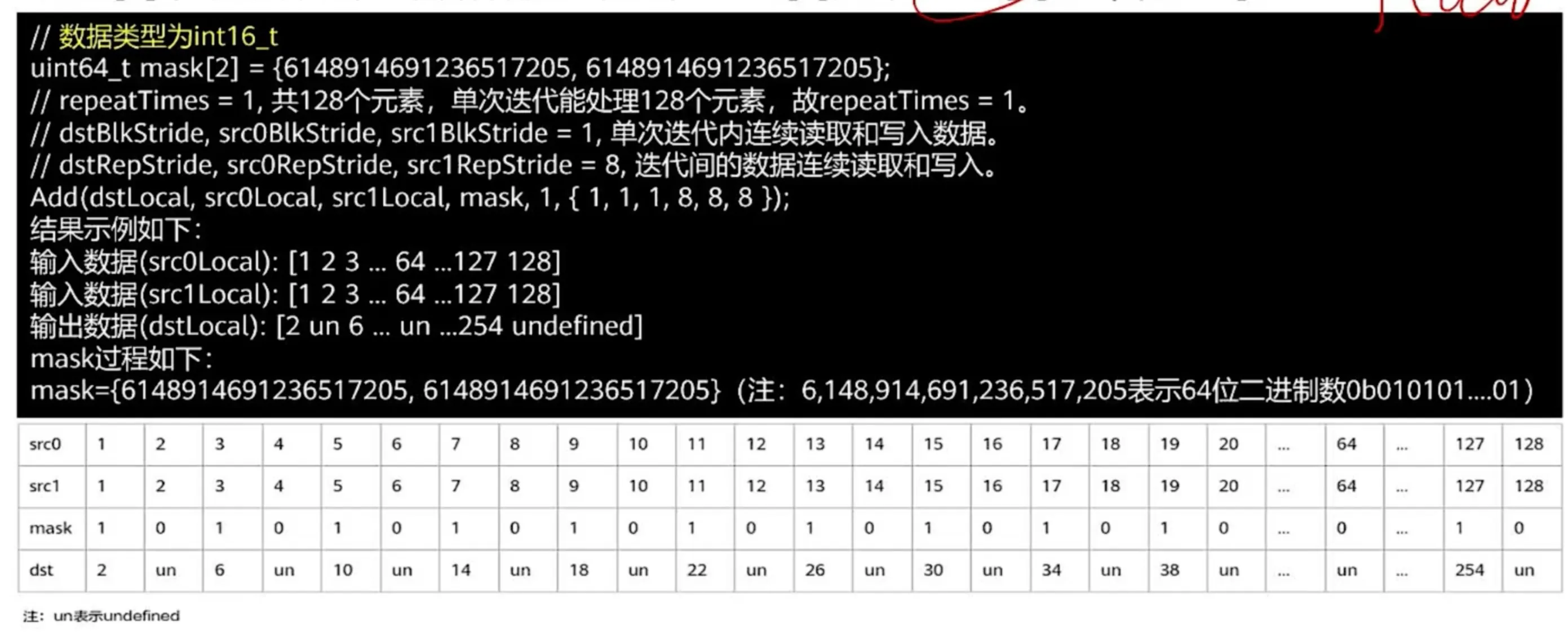
可以任意规定,哪些数字可以参与计算。此时 mask 为 uint64_t mask[] ,具体数组要几个 uint64_t 视数据类型而定。
当操作数为 16 位时,每次可以计算 128 个数字,所以要用到 uint64_t mask[2] 。
当操作数为 32 位时,每次可以计算 64 个数字,所以要用到 uint64_t mask[1] 。
当操作数为 8 位时,每次可以计算 256 个数字,所以要用到 uint64_t mask[4] 。
2 数据搬运API
支持的数据类型:
- GM → A1
- GM → B1
- CO1 → CO2
- CO2 → GM
- GM → VECIN
- VECIN → VECOUT
- VECOUT → GM
2.1 普通数据搬运接口
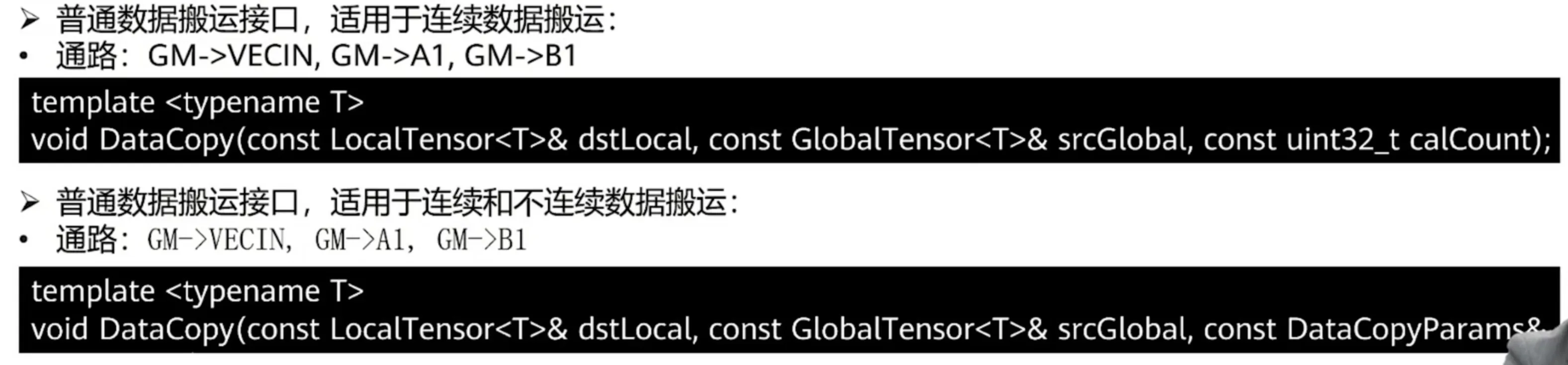
不连续搬运的 DataCopyParam 和计算API的有区别:
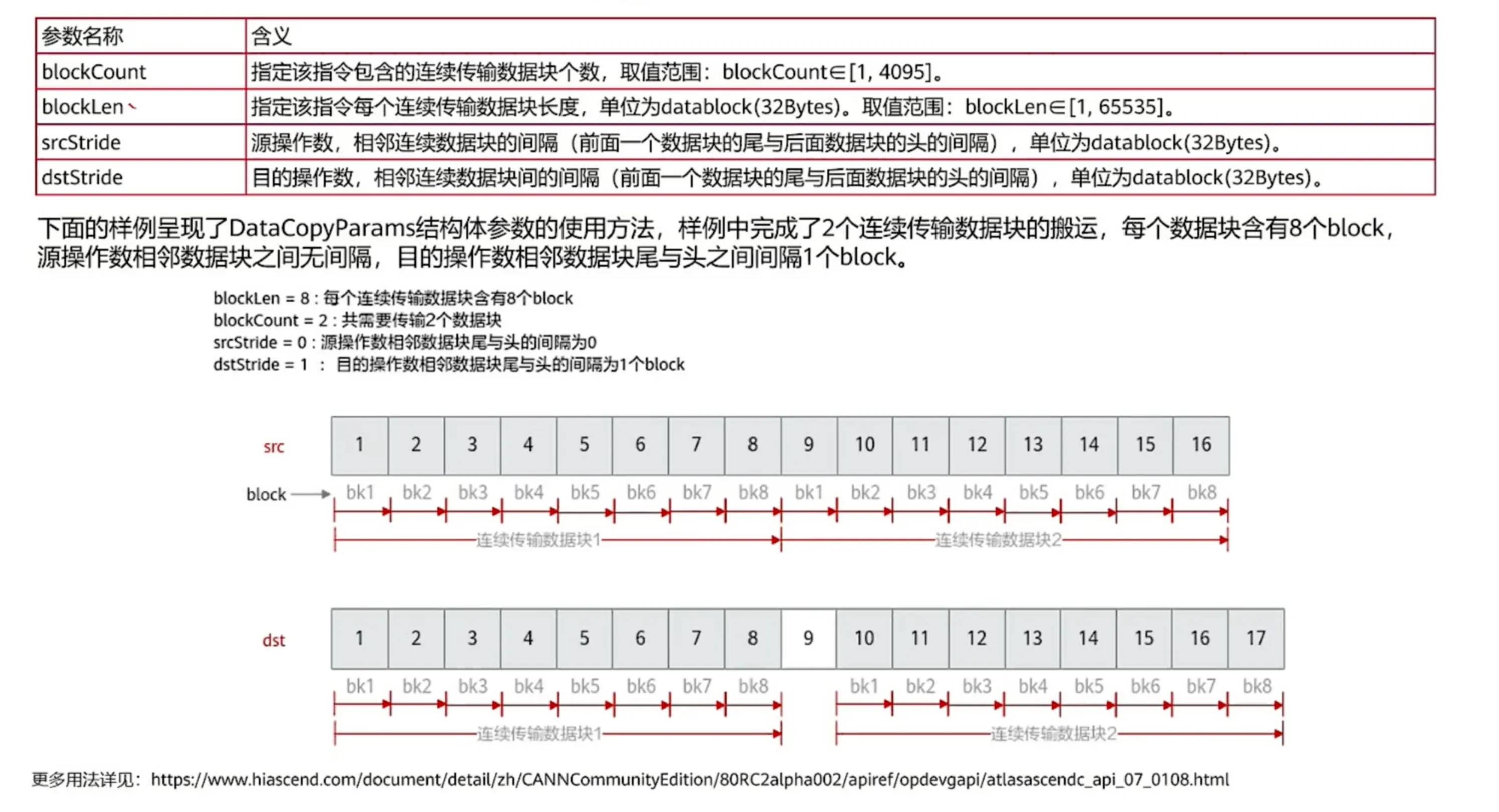
- blockCount:每次搬运多少个大数据块,一个大数据块有blockLen个block。
- blockLen:每个大数据块里有多少个小数据块,一个小数据块即为一个32B的block。
- stride:和计算API不一样,数据搬运是是“头和尾”相差多少,计算API是“头和头”(看图片)
3 内存管理API
TQue、TBuf、TPipe……
TQue 的 TPosition 是输入输出的变量,VECIN、VECOUT。
TBuf 的 TPosition 是中间缓冲变量,VECCALC 。
所有的 LocalTensor 都得由 TQue 和 TBuf 创建和释放。AllocTensor FreeTensor。
TPipe 用于给 TQue 和 TBuf 分配内存块,例如:
int num = 4;
int len = 1024;
TPipe = pipe;
TQue<TPosition::VECOUT, 2> que;
pip.InitBuffer(que, num, len); // 给 que 分配 4 个内存块,每个内存块1024B的数据4 任务同步API
EnQue 和 DeQue.
可以理解成,一个的 Process 是一次性启动了所有任务。这些函数本身是异步的。
__aicore__ inline void Process()
{
uint32_t loopCount = this->tileNum * BUFFER_NUM;
for (int32_t i = 0; i < loopCount; i++) {
CopyIn(i);
Compute(i);
CopyOut(i);
}
}但是 Compute 中用了 DeQue ,如果 TQue 中没有数据,不会执行后续的运算。这样实现的任务同步。
5 高级API
封装了常用算法,提升开发效率。
甚至可以直接用 GM 进行计算,搬运操作都封装进去了。
例如 Sinh 计算过程中需要用到临时变量(但是按我的原地计算实现,好像没用到临时变量)
高阶API的Sinh,会自动申请临时空间来保存中间变量。但是每次调用 Sinh 都会反复申请和释放临时空间。因此开发者可以提供 sharedTmpBuffer 传入自己申请的空间。
sharedTmpBuffer 需要多大?是典型的 Tiling 信息,需要在 host 侧算好,传给 device 。
对于 Sinh 甚至有 GetSinhMaxMinTmpSize 可以计算最大、最少需要多少空间。